基于無人機高光譜影像的馬鈴薯株高和地上生物量估算
本研究應用了400-1000nm的高光譜相機,可采用杭州彩譜科技有限公司產品FS60-無人機高光譜進行相關研究。FS60-無人機高光譜測量系統采用高信噪比超高速CCD成像器件,提供高穩定性的光譜圖像采集;采用自研的高效率低功耗圖像處理算法,大大延長了整機飛行時間,降低了系統功耗。
馬鈴薯作為我國主要農作物之一,其長勢監測和產量預測關系到國家糧食安全,因此快速、無損、高精度的馬鈴薯定量監測至關重要。地上生物量和株高是重要的農學參數,與作物的光合作用相關,一般用于評定作物生長情況、估算作物產量以及評價田間管理效益。近年來,通過遙感技術能夠高效、實時地對作物進行監測。然而,利用衛星和航空遙感技術雖能大面積獲取作物表型參數,但易受到天氣影響,限制了其在精準農業中的推廣應用。無人機遙感技術的發展,使現代化農業進入定量化。無人機搭載的數碼相機和多光譜相機含有波段數量少,無法獲取作物冠層充足的光譜信息,阻礙了對作物表型參數進行多波段研究。高光譜遙感光譜分辨率較高,可以獲得大量的光譜信息,能夠更精確地提取與作物長勢相關的光譜波段。因此無人機高光譜技術能夠更好地監測作物的生長情況。國內外許多學者對高光譜技術進行了大量研究,利用無人機高光譜數據,將葉面積指數、葉片葉綠素含量、植株氮含量、植株水分含量等指標按照均等權重構建綜合指標,通過多種光譜指數采用偏最小二乘回歸方法構建綜合指標模型,結果表明,綜合指標與光譜指數的相關性更高、反演效果更好。
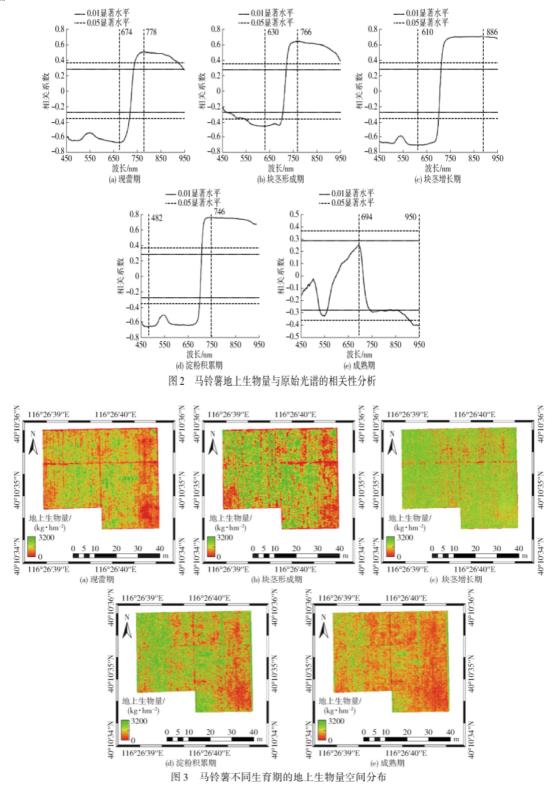
結果表明: (1)基于DSM提取的H與實測株高具有高度的擬合性(R2=0.84),得到的HQ精度較高。 (2)**光譜指數在不同生育期與地上生物量相關性不同,現蕾期相關系數絕對值最高的光譜參數為Rga(r=0.679),塊莖形成期相關系數絕對值最高的參數為PSRI(r=0.727),塊莖增長期相關系 數絕對值最高的為CIrededge和NDVIcanste(r =0.747),淀粉積累期相關系數絕對值**的為R-46 和SPVI(r=0.756),成熟期**光譜指數為RSso (r=0.405)。 (3)以株高、**光譜指數為變量,運用ER估測馬鈴薯地上生物量,綜合5個生育期可知,每個生育期得到的模型效果優劣次序依次為**光譜參數、Ha、H,塊莖增長期以CIrededge參數估測的地上生物量精度最高,ER 建模集和驗證集R2分別為0.45和0.48、RMSE分別為229.01kg/hm2和218.76 kg/hm2、NRMSE分別為19.19%和17.89%。 (4)每個生育期利用MLR、PLSR、RF3種建模方法分別基于VIs和VIs+H 估算馬鈴薯地上生物量,以后者為輸入變量構建的估算模型效果**。每種方法以同種變量在塊莖增長期表現效果**,塊莖形成期和淀粉積累期次之,現蕾期和成熟期表現最差。 |